Conceptos de Máquinas Simples
1.- Las Palancas.-
Son mecanismos que usamos para aumentar nuestra fuerza y mover los objetos. Una palanca es un brazo rígido, el cual se mueve alrederor de un punto de apoyo (fulcro) para trabajar o multiplicar fuerzas. Las palancas se usan generalmente para:
-
Cambiar la dirección de una fuerza.
-
Aplicar una fuerza a distancia.
-
Aumentar una fuerza y movimiento.
Según la historia, la palanca se a usado desde la prehistoria, pero los registros evidentes provienen desde 3000 a.c. Estas evidencias corresponden a los sellos de Mesopotamia. El manuscrito más antiguo que hace referencia a la palanca forma parte de la Sinagoga o colección matemática de Pappus de Alejandría, una obra de ocho volúmenes que fue escrita aproximadamente en el año 340. Allí aparece la famosa frase de Arquímedes «Dadme un punto de apoyo y te moveré el mundo».
Según la posición relativa del punto de apoyo, existen tres tipos de palancas; las describiremos según las siguiente imágenes:
Palancas de Primer Grado: Cuando el punto de apoyo se encuentra entre la Resistencia y Potencia.


Palancas de Segundo Grado: Cuando la Resistencia se encuentra entre el punto de apoyo y la Potencia

Palancas de Tercer Grado: Cuando la potencia o fuerza se encuentra entre la Resistencia y Punto de Apoyo.


2.- Ruedas y Ejes.-
La rueda forma parte de un conjunto de máquinas simples, de hecho es una máquina elemental, tiene forma circular y de poco grosor proporcional con el diámetro, su función principal es la de girar sobre un eje, intercambia fuerzas por distancia o distancia por fuerza.
La parte principal de la rueda es la periferie de la rueda, que se cubre con materiales y terminaciones de diversos tipos con la finalidad de adaptar a una utilidad apropiada.
a) Tipos de Ruedas:
Rueda dentada.- (Engranajes) La periferia tiene forma de dientes el cual se une con otra rueda dentada produciendo giros en sentido inverso y si son 3 ruedas en el mismo sentido. Se le denomina comunmente como engranajes.
Ruedad de transporte.- Se emplea para disminuir al mínimo el rozamiento con el suelo. Este tipo de ruedas se le denomina neumáticos, se utiliza en los diferentes tipos de vehículos.
Polea.- Muy utilizada para la transmisión de movimientos, unidos con falas, cadenas u otros, se puede aumentar la fuerza para levantar mucho peso.
Rueda de palas.- (Turbinas) Se utilizan para captar la fuerza y producir movimiento, puede ser fuerzas como: aire, agua, aceite y otros.


b) Partes de la rueda.-
Tecnológicamente, la rueda es un elemento dependiente, pues depende de un eje y éste de un soporte. Las partes de la rueda son: Rueda, eje y armadura o soporte.
Eje.- Barra de forma cilíndrica, es el guía de movimiento de la rueda, generalmente en la parte central (Menos las excéntricas). Existen dos tipos de ejes, los ejes solidarios que son los que giran con la rueda como el eje de levas del motor y la otra que está unido al soporte como de las bicicletas, carros patines y otros.
Soporte.- Lugar donde se sujeta el eje, generalmente tiene forma de horquilla y esta unida a la máquina.
El desarrollo de la rueda data aproximadamente desde 3000 a.c., en la civilización mesopotámica, al inicio se utilizó jaladas por animales, y posteriormente se aplicaron mecanismos para suplantar ese tipo de fuerzas que ejercen la tracción.
c) Principios de la Fuerza.- Tenemos los siguiente principios:
Principio I.- Se necesita menos fuerza para empujar un objeto sobre las ruedas, además disminuye la fuerza de rozmiento.
Principio II.- En una curva, la rueda exterior recorre siempre una distancia más larga que la rueda interior. Las ruedas en ejes separados, cada rueda gira y recorre la distancia necesaria.
Principio III.- Las ruedas se pueden utilizar para reducir la fricción.
Principio IV.- No todas las ruedas son discos sólidos, mientras la manivela tenga mayor radio, se ncesitará menor fuerza.
3.- Engranajes.-
Son sistemas de mecanismos que transmiten movimiento de rotación desde un eje hasta otros mediante el contacto sucesivo de pequeñas levas denominadas dientes. Es una modificación de la rueda y del eje, tiene dientes alrededor forma de dientes para que pueda encajar de manera precisa con otro engranaje. La transmisión de fuerza se da de manera directa con otro engranaje, el engranaje de menor diámetro se llama piñón y el de mayor diámetro se llama corona.
Los engranajes trabajan en equipo, cuando dos o mas engranajes trabajan juntas, se les denomina máquina compuesta. Dos o más engranajes rabajando se denomina «tren de engranaje» y el engranaje al cual se aplica la fuerza, se le denomina engranaje motor.
a) Partes del Engranaje.- Las partes del engranaje común son:

– Cara.
– Cresta.
– Flanco.
– Valle.
– Circunferencia de cabeza.
– Circunferencia primitiva.
– Circunferencia raíz.
– Circunferencia base.
– Espesor del diente.
– Paso circular.
– Radio del entalle.
– Ancho del espacio.
– Ancho de la cara.
b) Tipos de engranajes.- El el siguiente gráfico indicamos algunos tipos de engranajes:

4.- Las Poleas.-
Son ruedas con una o varias ranuras por donde pasan las correas o cuerdas, se utilizan para transferir movimiento, fuerza, velocidad o para hacer girar otra rueda.
a) Partes de la Polea.-

– Cuerpo.
– Eje.
– Cubo.
– Radio.
– Chavetero.
– Radio.
– Garganta.
– Llanta.

b) Tipos de Poleas.-
– Poleas simples fija.
– Poleas simple móvil.
– Poleas Compuestas o polipastos.
5.- Fajas de Transmisión.-
Las fajas de transmisión se denominan también como correas de transmisión, funcionan mediante sistema de arrastre por fricción entre do o más poleas sujetas a un movimiento de rotación; existen varios tipos de fajas o correas como poleas existen, la polea que origina el mocimiento se le llama polea motriz.
Dentro de la variedad de tipos de fajas o correas de transmisión tenemos: Fajas en «V» o simples, multipistas o estriadas, fajas dentadas, entre otras.

6.- Las Cadenas de transmisión.-
Una cadena de transmisión sirve para transmitir movimiento por arrastre de fuerza entre dos ruedas dentadas. Pueden ser simples y multitronic.

6.- Transmisión de movimiento en 90 grados.-
Son los engranajes que se utilizan para transmitir movimiento entre ejes perpendiculares . Se trata de engranajes cónicos, rectos o helicoidales, siendo este último son los más utilizados en la transmisión ade los automóviles.


7.- Movimiento excéntrico.-
Este tipo de movimiento permite convertir un movimiento circular contínuo en tro movimiento alternativo que puede ser en un movimiento rectilíneo (Fig. 1). También puede ser en el sentido contrario, es decir; de un movimiento rectilíneo a circular como es el caso del funcionamiento del motor (Fig.2)


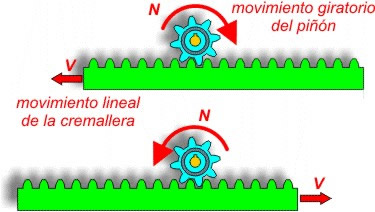
8.- Piñón y cremallera.-
Permite convertir un movimiento giratorio del piñón en uno lineal continuo de la cremallera , o viceversa. El movimiento giratorio del piñón es alternativo, por anto el movimieto lineal de la cremallera también lo será.
Su aplicación es muy diverso, por ejemplo: En el sistema de dirección de piñón y cremallera, en un taladro, etc.
…
Seguimos Implementando…